3.2.1机器人教学点位
驾校管理->机器人教学->机器人教学点位;点击 “新增”按钮,新增一个教学点位,如下图所示: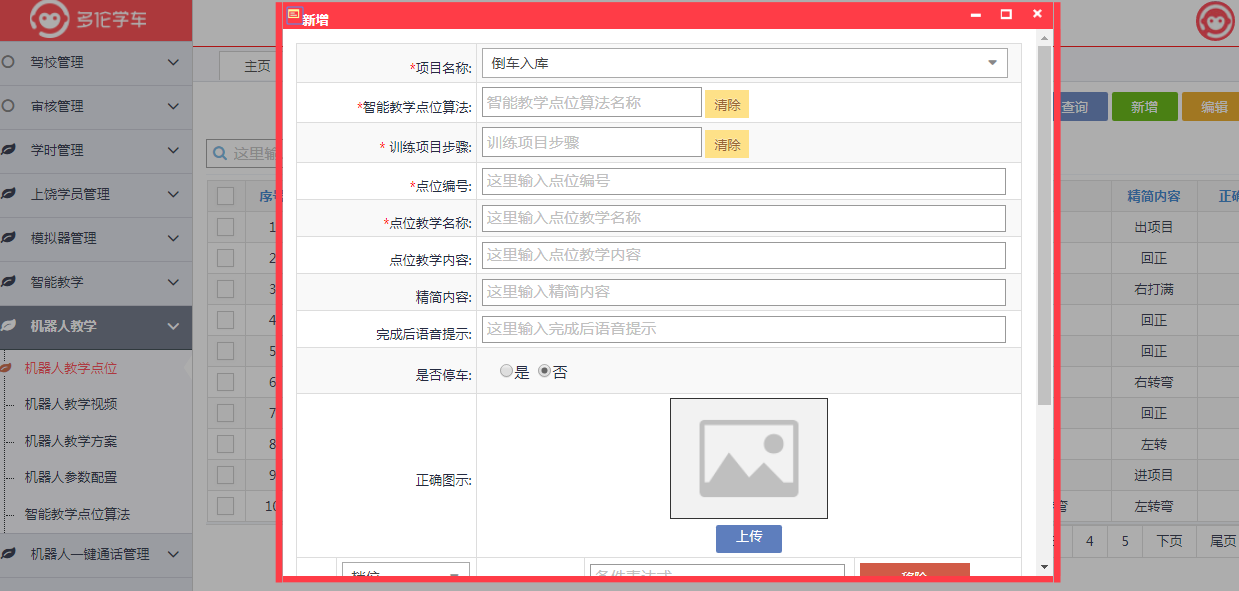

3.2.2机器人教学方案
注:教学方案为教学点位的集合和延伸
驾校管理->机器人教学->机器人教学方案;点击 “新增”按钮,新增一个教学方案,如下图所示:
机器人教学方案页面
填写完成:教学方案名称、精简教学语音、档位类型、科目类型、教学方案描述(带*号的选项都是必填项),所有选项填写完成后点击“保存”按钮,如下图所示: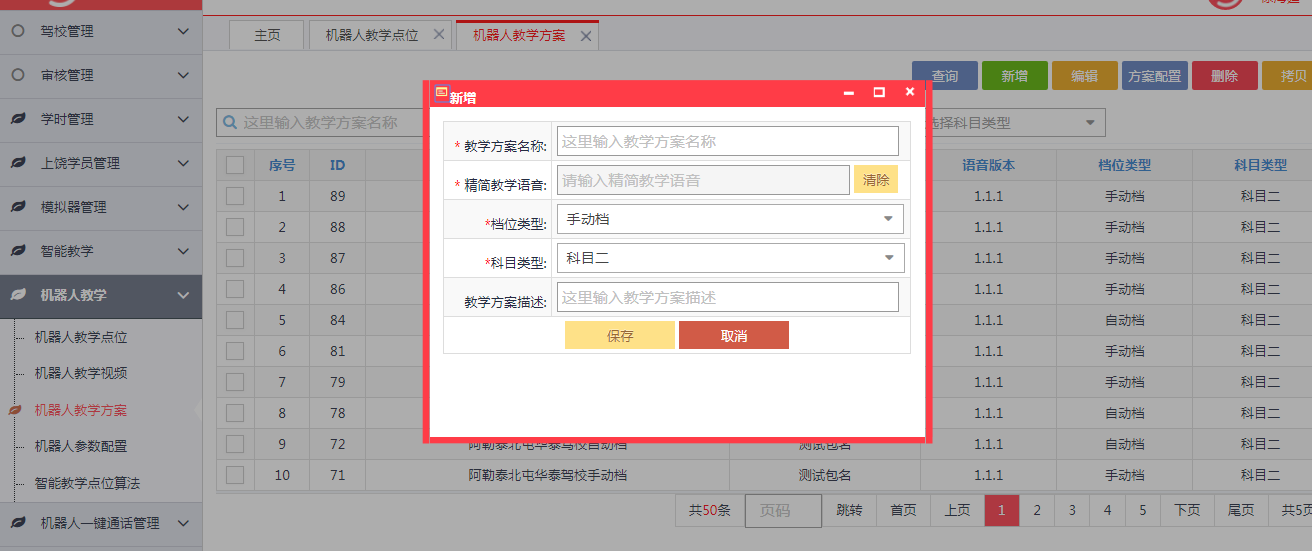
新增教学方案页面
勾选教学方案,点击“方案配置”,根据驾校实际情况进行教学视频配置、点位配置、参数配置,如下图所示:
方案配置→参数配置:挂空挡拉手刹是否解除后溜刹车、项目内外限速、转速超限等常用配置项
教学方案配置页面
3.2.3机器人参数配置
驾校管理->机器人教学->机器人参数配置;查询需要配置的驾校,勾选驾校,点击“机器人配置”按钮,进行方案配置,如下图所示;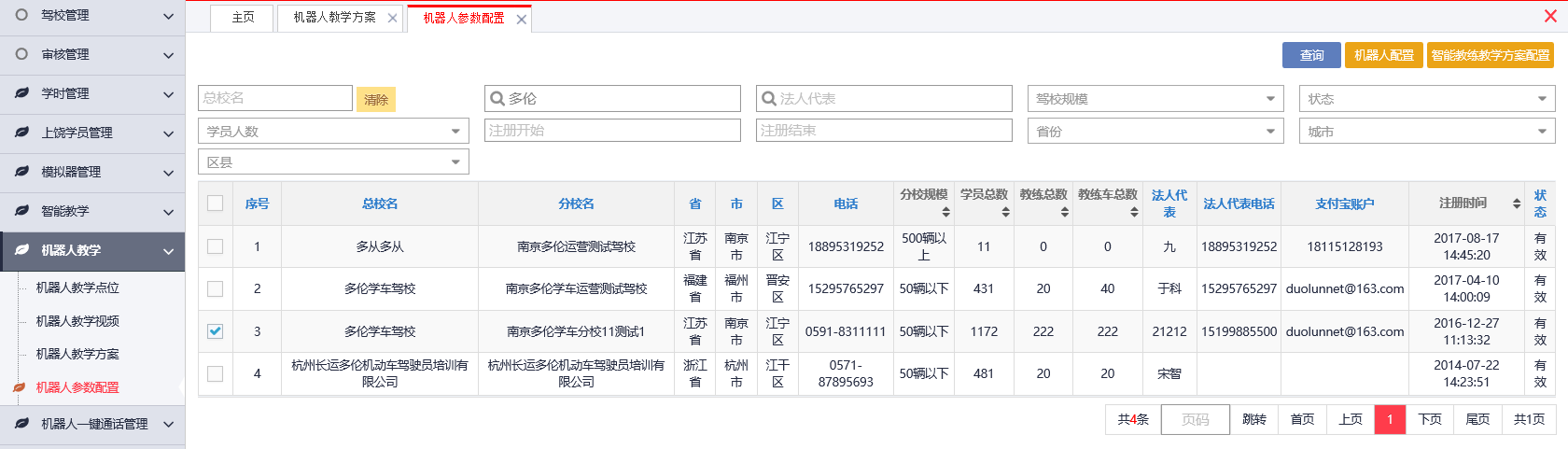
机器人参数配置页面
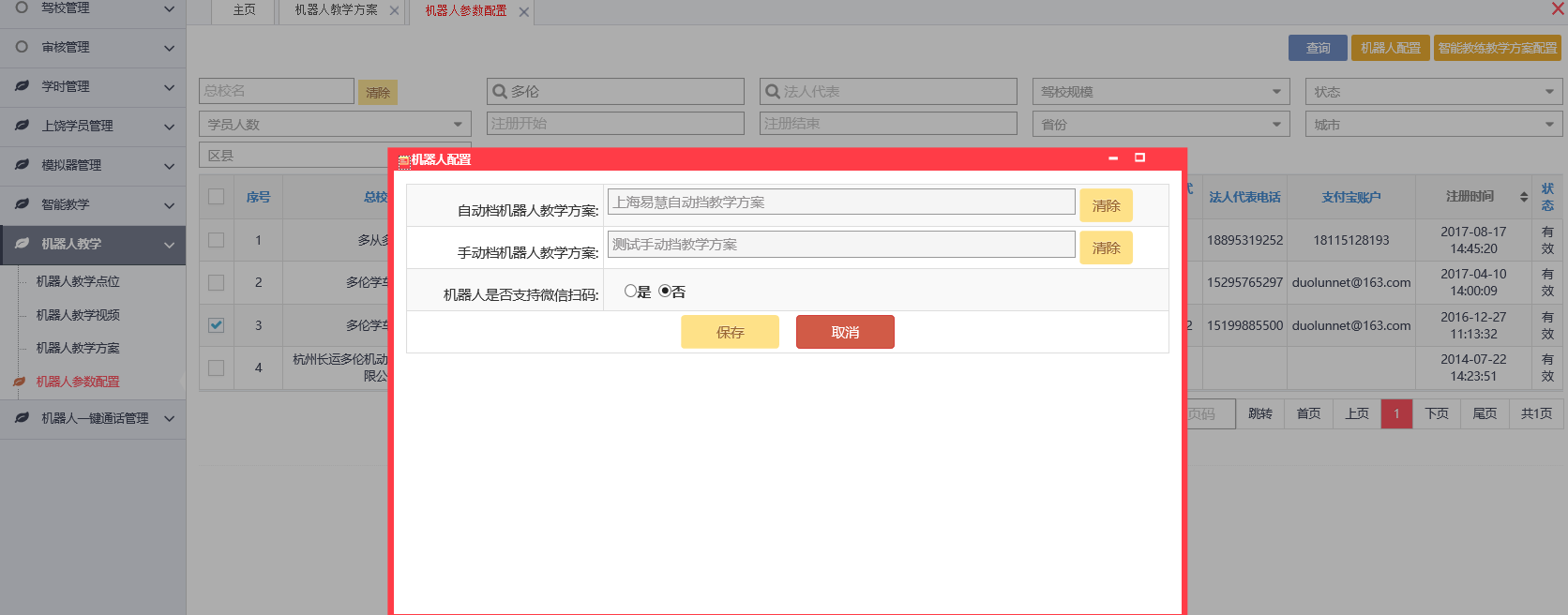
机器人教学方案配置页面
3.2.4智能教学点位算法
已配置完毕,如有新增需求请联系开发人员。
使用方法如下:
机器人教学点位→选择需要配置的教学点→编辑/新增→选择目标智能教学点位算法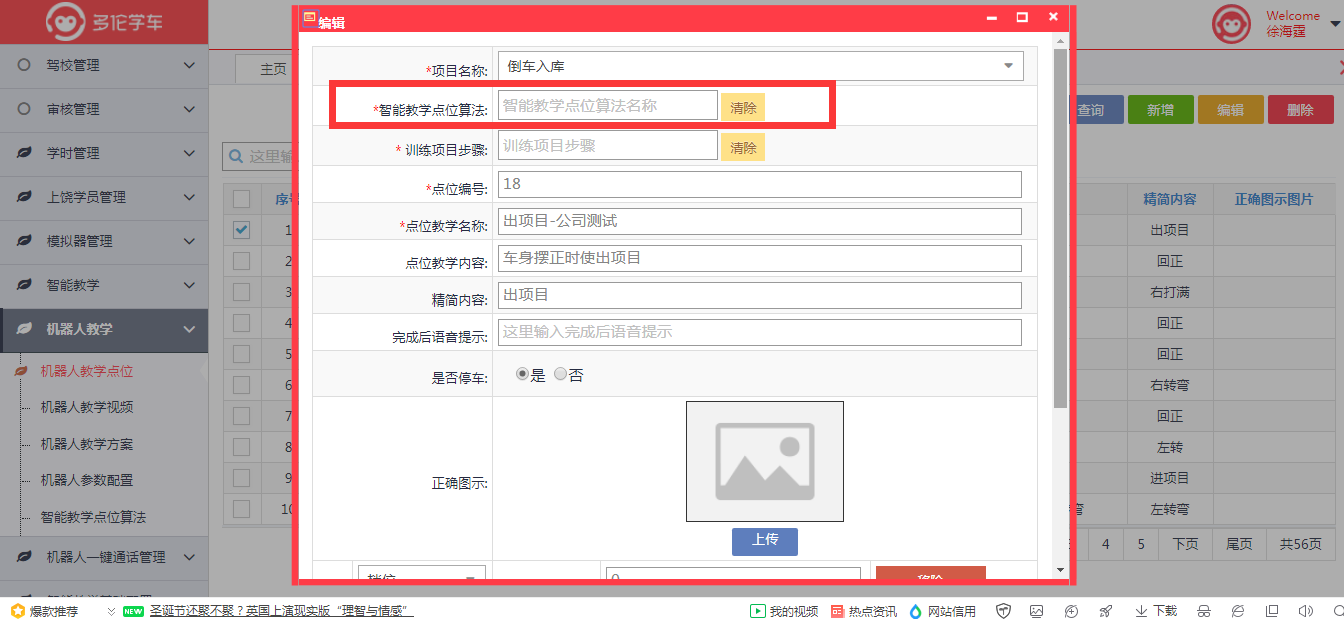

3.2.5机器人训练日志查看配置
驾校管理->分校列表;查询需要配置的驾校,勾选驾校,点击“参数配置”按钮,进行驾校参数配置,如下图所示: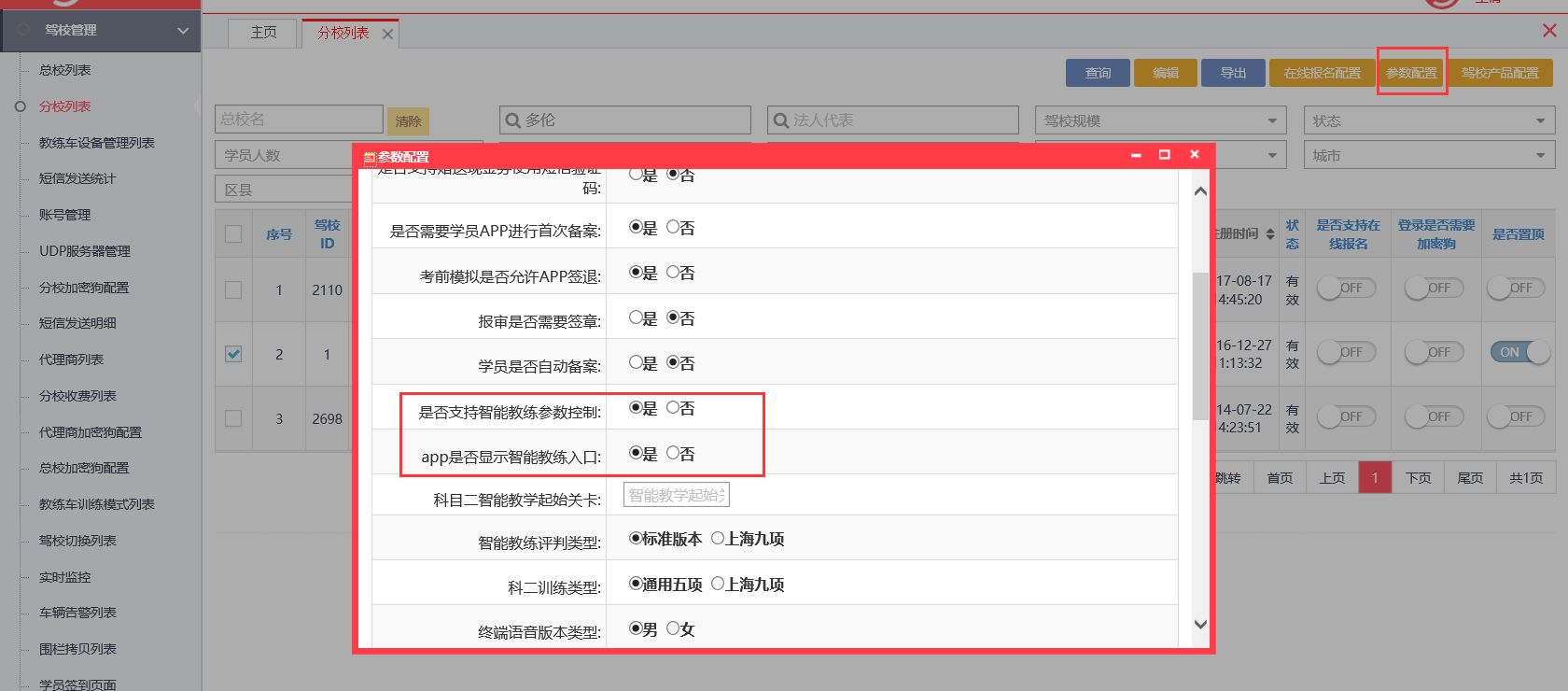
机器人训练日志查看配置
配置 “是否支持智能教练参数控制”为“是”;配置“app是否显示智能教练入口”为“是”;配置完成后平台和多多驾到APP上均可查看学员训练数据。